Built an agricultural robot using ESP-32 and Raspberry Pi that could be controlled by a user remotely. The robot had multiple sensors, including a soil moisture detector, which would help gauge the moisture in the soil. Moreover, we placed a camera to transmit a live feed to the server. A green filter was also programmed to help identify plants more efficiently. The goal was to make gauge the moisture in the soil. Moreover, we placed a camera to transmit a live feed to the server. A green filter was also programmed to help identify plants more efficiently. The goal was to make farming easier and more sustainable. The goal was to make gauge the moisture in the soil. Moreover, we placed a camera to transmit a live feed to the server. A green filter was also programmed to help identify plants more efficiently. The goal was to make farming easier and more sustainable.
LINE-FOLLOWING ROBOT
I built a line-following robot using an infrared sensor to detect and follow a marked path, successfully tested on a narrow curved route. This robot qualified for the regionals in the CISCE Robotics competition, a national-level event.
CONSTRUCTION ROBOT
I led my team in building a robot for the CISCE robotics competition regionals, a prestigious national level competition, equipped with a lifting and gripping mechanism. We used an Arduino motor driver (L293D) and an HC-06 Bluetooth module, along with a gear system for the lifting function. The robot’s task was to lift and place foam structures representing walls and trees to make a village name ‘Robo Villa’. Competing against over 1,000 teams, we successfully qualified for the regionals and participated among the top 30 teams.
StrideGuide
I built a wearable walking assistant designed to enhance the mobility and independence of visually impaired individuals. This device uses ultrasonic sensors to detect objects within 100 cm, providing a signal—either a beeping sound or vibration—based on the user’s preference when an obstruction is present.
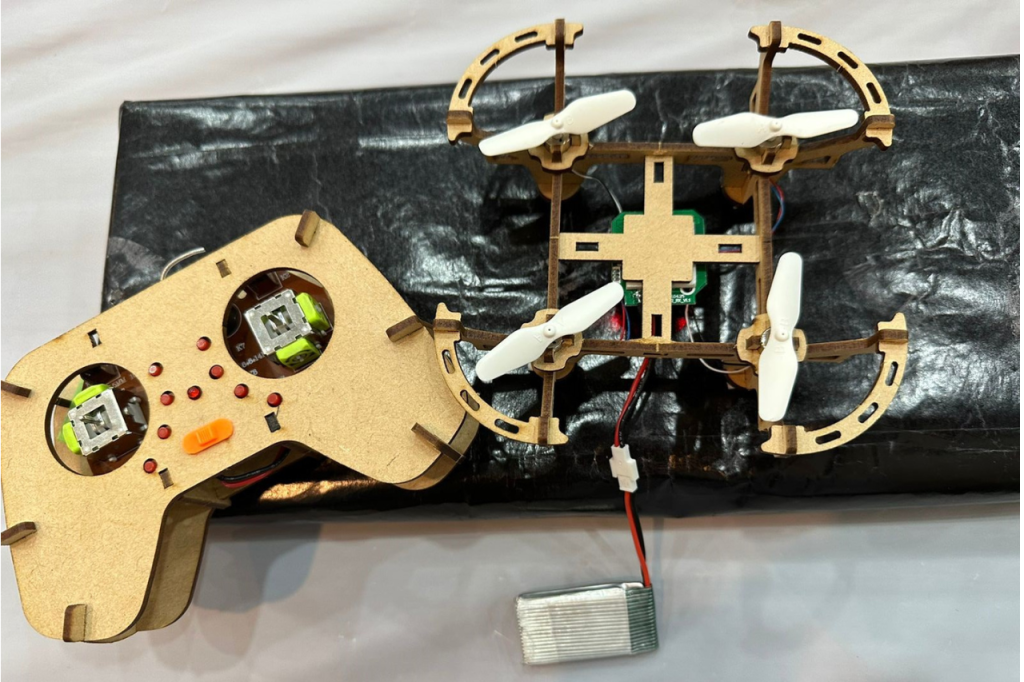
DRONE
I assembled a drone powered by Arduino for applications like aerial photography and surveying. Equipped with high-quality cameras and sensors, it uses GPS for navigation and obstacle avoidance.